1. 개요
굴착 플랫폼의 주파수 변환기의 구동 대상은 주로 린치, 턴타블 및 진흙 펌프입니다.
주파수 변환 전송 장비는 일반적으로 일반적인 DC 버스 스키마를 채택합니다. 전력 네트워크에 연결 된 시스템에 대한 경우, 직렬 장치는 피드백으로 구성 될 수 있습니다.그리고 중앙 브레이크 단위는 피드백이 불가능하면 DC 버스에 구성되어야 합니다..
굴착 플랫폼의 린치는 리프팅 응용 프로그램과 유사한 부하 특성을 가지고 있으며 인버터에는 개방/폐기 루프 벡터 제어, 큰 시작 토크가 필요합니다.제로 속도 호버 기능, 그리고 깊은 우물 플랫폼의 경우, 그것은 하나의 마스터와 여러 노예 동기 제어를 포함 할 수 있습니다.
리그의 회전 테이블은 토크 또는 부품이 깨지는 것을 방지하기 위해 토크를 제한해야합니다.

2주파수 변환 드라이브 스키마
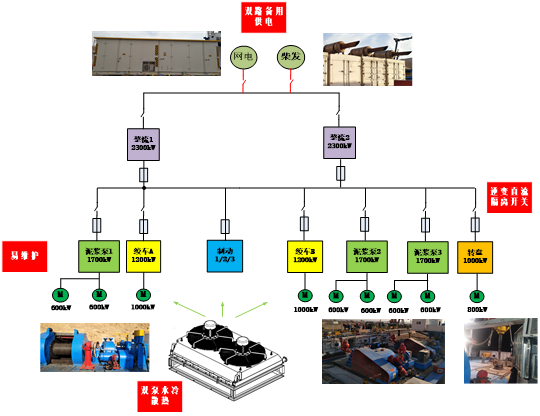
석유 굴착 시스템은 HD2000 시리즈 물 냉각 주파수 변환기를 채택, 시스템 구성은 포함됩니다: 전력 공급 시스템, 두 2.3MW 직렬기 단위, 세 1.7MW 진흙 펌프 단위, 두 1.2MW 린치 단위, 1MW 회전 장치, 3개의 1.2MW 중앙 브레이크 장치, 물 냉각 시스템, 각 인버터 장치에 대응하는 모터 및 외부 브레이크 저항.린치 유닛과 턴테일 유닛의 전력 단위는 1의 명산 전력으로 설계됩니다.0.4MW
그 중 에는:
1전체 시스템은 전력망이나 디젤 발전기로 공급될 수 있습니다.
2두 직선 단위와 모든 인버터 단위, 브레이크 단위 공통 버스;
3단위 캐비닛에 세 개의 브레이크 유닛;
43개의 진흙 펌프를 2개로 拖拉할 수 있습니다. 즉, 600kW 동축 모터 2개가 동행으로 작동하는 출력입니다.
5린치 A와 린치 B는 마스터-슬래브 모드에서 작동합니다.
6린치와 턴테이블은 코드 트레이 모듈이 장착되어 있습니다.
7물 냉각 시스템은 이중 펌프 시스템을 채택하고 순환 펌프는 작동 중에 임의로 선택 될 수 있습니다.
시스템 토폴로지는 다음과 같습니다.
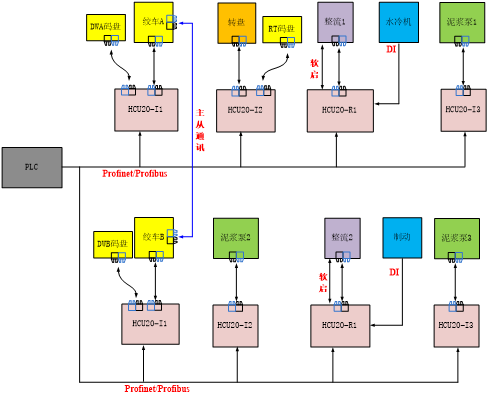
석유 굴착용 물 냉각 멀티 전송 주파수 변환기는 8개의 HCU20 컨트롤러를 사용하여 직렬기 및 인버터 단위를 독립적으로 제어합니다.시스템 운영의 신뢰성을 보장합니다., 주요 제어 PLC, 물 냉각기, 브레이크 및 코드 디스크와 통신 및 상태 신호 전송을 실현.
그 중 에는:
1주요 제어 PLC와 각 HCU20 사이의 통신은 Profinet 버스 또는 Profibus 버스를 선택할 수 있습니다.
2- 마스터-스래브 제어 모드는 린치 A와 린치 B 사이에 실현됩니다.
3물 냉각 캐비닛은 지역적으로 제어 할 수 있습니다. 또는 직렬기 1의 컨트롤러에 의해 원격으로 제어 할 수 있습니다.
4브레이크 유닛은 직렬 2 컨트롤러와 통신을 설정하고 브레이크 유닛의 상태 정보는 직렬 2 컨트롤러로 전송될 수 있습니다.또는 브레이크 유닛의 결함 재설정을 수리 2 컨트롤러를 통해 실현 될 수 있습니다;
5. 진흙 펌프는 VF 모드 작동, 린치와 턴테이블은 CLVC (코드 플레이트 벡터 제어) 작동;
6각 HCU20 컨트롤러는 충분한 AI, AO, DI 및 DO 신호 인터페이스를 백업으로 갖추고 있습니다.
제어 시스템 토폴로지는 다음과 같습니다.